Timers/Counters Programming
- The 8051 has two timers/counters, they can be used either as
- Timers to generate a time delay or as
- Event counters to count events happening outside the microcontroller
- Both Timer 0 and Timer 1 are 16 bits wide
- Since 8051 has an 8-bit architecture, each 16-bits timer is accessed as two separate registers of low byte and high byte
- The low byte register is called TL0/TL1
- The high byte register is called TH0/TH1

TMOD Register
Both timers 0 and 1 use the same register, called TMOD (timer mode), to set the various timer operation modes
- TMOD is a 8-bit register
- The lower 4 bits are for Timer 0
- The upper 4 bits are for Timer 1
- In each case,
- The lower 2 bits are used to set the timer mode
- The upper 2 bits to specify the operation

Modes of Operation:
M0
|
M1
|
Mode
|
Operating mode
|
0
|
0
|
0
|
13-bit timer mode
8-bit timer/counter THx with TLx as 5-bit prescaler
|
0
|
1
|
1
|
16-bit timer mode
16-bit timer/counter THx and TLx are cascaded; there is no prescaler
|
1
|
0
|
2
|
8-bit auto reload
8-bit auto reload timer/counter; THx holds a value which is to be
reloaded TLx each time it overfolws
|
1
|
1
|
3
|
Split timer mode
|
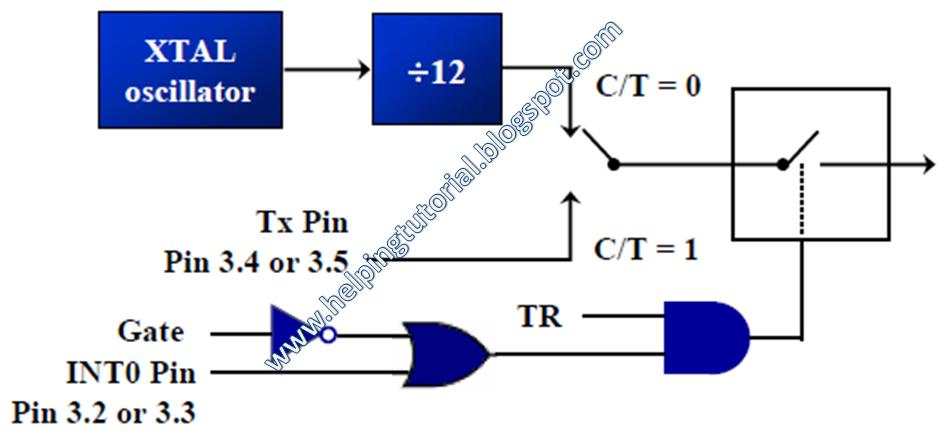
- C/T : Timer or counter selected
- Cleared for timer operation (input from internal system clock)
- Set for counter operation (input from Tx input pin)
- GATE:Gating control when set.
- Timer/counter is enable only while the INTx pin is high and the TRx control pin is set
- When cleared, the timer is enabled whenever the TRx control bit is set
Timers of 8051 do starting and stopping by either software or hardware control
- In using software to start and stop the timer where GATE=0
- The start and stop of the timer are controlled by way of software by the TR (timer start) bits TR0 and TR1
- The SETB instruction starts it, and it is stopped by the CLR instruction
- These instructions start and stop the timers as long as GATE=0 in the TMOD register
- The hardware way of starting and stopping the timer by an external source is achieved by making GATE=1 in the TMOD register
Case of GATE = 1
- If GATE = 1, the start and stop of the timer are done externally through pins P3.2 and P3.3 for timers 0 and 1, respectively
- This hardware way allows to start or stop the timer externally at any time via a simple switch
Mode 1 Programming
The following are the characteristics and operations of mode1:
- It is a 16-bit timer; therefore, it allows value of 0000 to FFFFH to be loaded into the timer’s register TL and TH
- After TH and TL are loaded with a 16-bit initial value, the timer must be started
- This is done by SETB TR0 for timer 0 and SETB TR1 for timer 1
- After the timer is started, it starts to count up
- It counts up until it reaches its limit of FFFFH
- When it rolls over from FFFFH to 0000, it sets high a flag bit called TF (timer flag)
- Each timer has its own timer flag: TF0 for timer 0, and TF1 for timer 1
- This timer flag can be monitored
- When this timer flag is raised, one option would be to stop the timer with the instructions CLR TR0 or CLR TR1, for timer 0 and timer 1, respectively
- After the timer reaches its limit and rolls over, in order to repeat the process
- TH and TL must be reloaded with the original value, and
- TF must be reloaded to 0

Steps to Mode 1 Program
To generate a time delay
- Load the TMOD value register indicating which timer (timer 0 or timer 1) is to be used and which timer mode (0 or 1) is selected
- Load registers TL and TH with initial count value
- Start the timer
- Keep monitoring the timer flag (TF) with the JNB TFx,target instruction to see if it is raised
- Get out of the loop when TF becomes high
- Stop the timer
- Clear the TF flag for the next round
- Go back to Step 2 to load TH and TL again
Example:
In the following program, we create a square wave of 50%
duty cycle (with equal portions high and low) on the P1.5 bit. Timer 0 is used
to generate the time delay. Analyze the program
MOV TMOD,#01 ;Timer 0, mode
1(16-bit mode)
HERE:
MOV TL0,#0F2H ;TL0=F2H, the low byte
MOV TH0,#0FFH ;TH0=FFH, the high byte
CPL P1.5 ;toggle P1.5
ACALL DELAY
SJMP HERE
In the above program notice the following step.
1. TMOD is loaded.
2. FFF2H is loaded into TH0-TL0.
3. P1.5 is toggled for the high and low portions of the
pulse.
DELAY:
SETB TR0 ;start the timer 0
AGAIN:
JNB TF0,AGAIN ;monitor timer flag 0
;until it rolls
over
CLR TR0 ;stop timer 0
CLR TF0 ;clear timer 0 flag
RET
4. The DELAY subroutine using the timer is called.
5. In the DELAY subroutine, timer 0 is started by the SETB TR0 instruction.
6. Timer 0 counts up with the passing of each clock, which is provided by the crystal oscillator. As the timer counts up, it goes through the states of FFF3, FFF4, FFF5, FFF6, FFF7, FFF8, FFF9, FFFA, FFFB, and so on until it reaches FFFFH. One more clock rolls it to 0, raising the timer flag (TF0=1). At that point, the JNB instruction falls through.

7. Timer 0 is stopped by the instruction CLR TR0. The DELAY subroutine ends, and the process is repeated.
Notice that to repeat the process, we must reload the TL and TH registers, and start the process is repeated
Example:
Find the delay generated by timer 0 in the following code,
using both of the Methods of Figure 9-4. Do not include the overhead due to instruction.
CLR P2.3 ;Clear P2.3
MOV TMOD,#01 ;Timer 0, 16-bitmode
HERE:
MOV TL0,#3EH ;TL0=3Eh, the low byte
MOV TH0,#0B8H ;TH0=B8H, the high byte
SETB P2.3 ;SET high timer 0
SETB TR0 ;Start the timer 0
AGAIN:
JNB TF0,AGAIN ;Monitor timer
flag 0
CLR TR0 ;Stop the timer 0
CLR TF0 ;Clear TF0 for next round
CLR P2.3
Solution:
(a) (FFFFH – B83E + 1) = 47C2H = 18370 in decimal and 18370 × 1.085 us = 19.93145 ms
(b) Since TH – TL = B83EH = 47166 (in decimal) we have 65536 – 47166 = 18370. This means that the timer counts from B38EH to FFFF. This plus Rolling over to 0 goes through a total of 18370 clock cycles, where each clock is 1.085 us in duration. Therefore, we have 18370 × 1.085 us = 19.93145 ms as the width of the pulse.
Example:
Modify TL and TH in Example above to get the largest time
delay possible. Find the delay in ms. In your calculation, exclude the overhead
due to the instructions in the loop.
Solution:
To get the largest delay we make TL and TH both 0. This will
count up from 0000 to FFFFH and then roll over to zero.
CLR P2.3 ;Clear P2.3
MOV TMOD,#01 ;Timer 0, 16-bitmode
HERE:
MOV TL0,#0 ;TL0=0, the low byte
MOV TH0,#0 ;TH0=0, the high byte
SETB P2.3 ;SET high P2.3
SETB TR0 ;Start timer 0
AGAIN:
JNB TF0,AGAIN ;Monitor timer
flag 0
CLR TR0 ;Stop the timer 0
CLR TF0 ;Clear timer 0 flag
CLR P2.3
Making TH and TL both zero means that the timer will count
from 0000 to FFFF, and then roll over to raise the TF flag. As a result, it goes
through a total Of 65536 states. Therefore, we have delay =
(65536 - 0) × 1.085 us = 71.1065ms.
Example:
The following program generates a square wave on P1.5
continuously using timer 1 for a time delay. Find the frequency of the square wave
if XTAL = 11.0592 MHz. In your calculation do not include the overhead due to
Instructions in the loop.
MOV TMOD,#10 ;Timer 1, mod 1 (16-bitmode)
AGAIN:
MOV TL1,#34H ;TL1=34H,
low byte of timer
MOV TH1,#76H ;TH1=76H, high
byte timer
SETB TR1 ;start the timer 1
BACK:
JNB TF1,BACK ;till timer rolls over
CLR TR1 ;stop the timer 1
CPL P1.5 ;comp. p1. to get hi, lo
CLR TF1 ;clear timer flag 1
SJMP AGAIN ;is not auto-reload
Solution:
Since FFFFH – 7634H = 89CBH + 1 = 89CCH and 89CCH = 35276 clock
count and 35276 × 1.085 us = 38.274 ms for half of the square wave. The
frequency = 13.064Hz. Also notice that the high portion and low portion of the
square wave pulse are equal. In the above calculation, the overhead due to all the
instruction in the loop is not included.
Example:
Example:

Example:
Timers can also be used as counters counting events happening outside the 8051

Finding the Loaded Timer Values
To calculate the values to be loaded into the TL and TH registers, look at the following example
- Assume XTAL = 11.0592 MHz, we can use the following steps for finding the TH, TL registers’ values
- Divide the desired time delay by 1.085 us
- Perform 65536 – n, where n is the decimal value we got in Step1
- Convert the result of Step2 to hex, where yyxx is the initial hex value to be loaded into the timer’s register
- Set TL = xx and TH = yy
Example:
Assume that XTAL = 11.0592 MHz. What value do we need to
load the timer’s register if we want to have a time delay of 5 ms (milliseconds)?
Show the program for timer 0 to create a pulse width of 5 ms on P2.3.
Solution:
Since XTAL = 11.0592 MHz, the counter counts up every 1.085
us. This means that out of many 1.085 us intervals we must make a 5 ms pulse.
To get that, we divide one by the other. We need 5 ms / 1.085 us = 4608 clocks.
To Achieve that we need to load into TL and TH the value 65536 – 4608 = EE00H.
Therefore, we have TH = EE and TL = 00.
CLR P2.3 ;Clear P2.3
MOV TMOD,#01 ;Timer 0, 16-bitmode
HERE:
MOV TL0,#0 ;TL0=0, the low byte
MOV TH0,#0EEH ;TH0=EE, the high byte
SETB P2.3 ;SET high P2.3
SETB TR0 ;Start timer 0
AGAIN:
JNB TF0,AGAIN ;Monitor timer
flag 0
CLR TR0 ;Stop the timer 0
CLR TF0 ;Clear timer 0 flag
Assume that XTAL = 11.0592 MHz, write a program to generate
a square wave of 2 kHz frequency on pin P1.5.
Solution:
This is similar to Examples above, except that we must toggle
the bit to generate the square wave. Look at the following steps.
(a) T = 1 / f = 1 / 2 kHz = 500 us the period of square
wave.
(b) 1 / 2 of it for the high and low portion of the pulse is
250 us.
(c) 250 us / 1.085 us = 230 and 65536 – 230 = 65306 which in
hex is FF1AH.
(d) TL = 1A and TH = FF, all in hex. The program is as
follow.
MOV TMOD,#01 ;Timer 0, 16-bitmode
AGAIN:
MOV TL1,#1AH ;TL1=1A, low
byte of timer
MOV TH1,#0FFH ;TH1=FF, the high byte
SETB TR1 ;Start timer 1
BACK:
JNB TF1,BACK ;until timer rolls over
CLR TR1 ;Stop the timer 1
CLR P1.5 ;Clear timer flag 1
CLR TF1 ;Clear timer 1 flag
SJMP AGAIN ;Reload timer
Assume XTAL = 11.0592 MHz, write a program to generate a
square wave of 50 kHz frequency on pin P2.3.
Solution:
Look at the following steps.
(a) T = 1 / 50 = 20 ms, the period of square wave.
(b) 1 / 2 of it for the high and low portion of the pulse is
10 ms.
(c) 10 ms / 1.085 us = 9216 and 65536 – 9216 = 56320 in
decimal, and in hex it is DC00H.
(d) TL = 00 and TH = DC (hex).
MOV TMOD,#10H ;Timer 1, mod 1
AGAIN:
MOV TL1,#00 ;TL1=00,low byte of timer
MOV TH1,#0DCH ;TH1=DC, the high byte
SETB TR1 ;Start timer 1
BACK:
JNB TF1,BACK ;until timer rolls over
CLR TR1 ;Stop the timer 1
CLR P2.3 ;Comp. p2.3 to get hi, lo
SJMP AGAIN ;Reload timer
;mode 1 isn’t
auto-reload
Generating Large Time Delay
Example:
Examine the following program and find the time delay in
seconds. Exclude the overhead due to the instructions in the loop.
MOV TMOD,#10H ;Timer 1, mod 1
MOV R3,#200 ;cnter for multiple delay
AGAIN:
MOV TL1,#08H ;TL1=08,low byte of timer
MOV TH1,#01H ;TH1=01,high
byte
SETB TR1 ;Start timer 1
BACK:
JNB TF1,BACK ;until timer rolls over
CLR TR1 ;Stop the timer 1
CLR TF1 ;clear Timer 1 flag
DJNZ R3,AGAIN ;if R3 not zero
then
;reload timer
Solution:
TH-TL = 0108H = 264 in decimal and 65536 – 264 = 65272. Now 65272
× 1.085 μs = 70.820 ms, and for 200 of them we have 200 ×70.820 ms = 14.164024
seconds.
Mode 2 Programming
Characteriustics of Mode 2
The following are the characteristics and operations of mode 2:
- It is an 8-bit timer; therefore, it allows only values of 00 to FFH to be loaded into the timer’s register TH
- After TH is loaded with the 8-bit value, the 8051 gives a copy of it to TL
- Then the timer must be started
- This is done by the instruction SETB TR0 for timer 0 and SETB TR1 for timer 1
- After the timer is started, it starts to count up by incrementing the TL register
- It counts up until it reaches its limit of FFH
- When it rolls over from FFH to 00, it sets high the TF (timer flag) When the TL register rolls from FFH to 0 and TF is set to 1, TL is reloaded automatically with the original value kept by the TH register
- When the TL register rolls from FFH to 0 and TF is set to 1, TL is reloaded automatically with the original value kept by the TH register
- To repeat the process, we must simply clear TF and let it go without any need by the programmer to reload the original value
- This makes mode 2 an auto-reload, in contrast with mode 1 in which the programmer has to reload TH and TL

Steps to Mode 2 Program
To generate a time delay
- Load the TMOD value register indicating which timer (timer 0 or timer 1) is to be used, and the timer mode (mode 2) is selected
- Load the TH registers with the initial count value
- Start timer
- Keep monitoring the timer flag (TF) with the JNB TFx,target instruction to see whether it is raised
- Get out of the loop when TF goes high
- Clear the TF flag
- Go back to Step4, since mode 2 is autoreload
Example:
Assume XTAL = 11.0592 MHz, find the frequency of the square wave
generated on pin P1.0 in the following program
MOV TMOD,#20H ;T1/8-bit/auto reload
MOV TH1,#5 ;TH1 = 5
SETB TR1 ;start the timer 1
BACK:
JNB TF1,BACK ;till timer rolls over
CPL P1.0 ;P1.0 to hi, lo
CLR TF1 ;clear Timer 1 flag
SJMP BACK ;mode 2 is auto-reload
Solution:
First notice the target address of SJMP. In mode 2 we do not
need to reload TH since it is auto-reload. Now (256 - 05) × 1.085 us = 251 ×
1.085 us = 272.33 us is the high portion of the pulse. Since it is a 50% duty
cycle square wave, the period T is twice that; as a result T = 2 × 272.33 us =
544.67 us and the frequency = 1.83597 kHz
Find the frequency of a square wave generated on pin P1.0.
Solution:
MOV TMOD,#2H ;Timer 0, mod 2
;(8-bit, auto
reload)
MOV TH0,#0
AGAIN:
MOV R5,#250 ;multiple delay count
ACALL DELAY
CPL P1.0
SJMP AGAIN
DELAY:
SETB TR0 ;start the timer 0
BACK:
JNB TF0,BACK ;stay timer rolls over
CLR TR0 ;stop timer
CLR TF0 ;clear TF for next round
DJNZ R5,DELAY
RET
T = 2 ( 250 × 256 × 1.085 us ) = 138.88ms, and frequency =
72 Hz
COUNTER PROGRAMMING
Timers can also be used as counters counting events happening outside the 8051
- When it is used as a counter, it is a pulse outside of the 8051 that increments the TH, TL registers
- TMOD and TH, TL registers are the same as for the timer discussed previously
C/T Bit in TMOD Register
- The C/T bit in the TMOD registers decides the source of the clock for the timer
- When C/T = 1, the timer is used as a counter and gets its pulses from outside the 8051
- The counter counts up as pulses are fed from pins 14 and 15, these pins are called T0 (timer 0 input) and T1 (timer 1 input)
Example:
Assuming that clock pulses are fed into pin T1, write a
program for counter 1 in mode 2 to count the pulses and display the state of
the TL1 count on P2, which connects to 8 LEDs.
Solution:
MOV TM0D,#01100000B ;counter 1, mode 2,
;C/T=1 external
pulses
MOV TH1,#0 ;clear TH1
SETB P3.5 ;make T1 input
AGAIN:
SETB TR1 ;start the counter
BACK:
MOV A,TL1 ;get copy of TL
MOV P2,A ;display it on port 2
JNB TF1,Back ;keep
doing, if TF = 0
CLR TR1 ;stop the counter 1
CLR TF1 ;make TF=0
SJMP AGAIN ;keep doing it
Notice in the above program the role of the instruction SETB
P3.5. Since ports are set up for output when the 8051 is powered up, we make
P3.5 an input port by making it high. In other words, we must configure (set
high) the T1 pin (pin P3.5) to allow pulses to be fed into it.
TCON Register
TCON (timer control) register is an 8- bit register

- The upper four bits are used to store the TF and TR bits of both timer 0 and 1
- The lower 4 bits are set aside for controlling the interrupt bits

No comments:
Post a Comment